
面向我国新型无人机研制需求,本项目重点研究了适应机载嵌入式系统的无人机机载软件支撑环境,提出了应用驱动的多态实时计算模型,并在新型无人机机载任务计算平台中进行了典型应用验证。
无人机机载软件支撑环境由两部分组成。第一部分是无人机机载软件运行平台。该平台部署于无人机机载目标硬件之上,包括无人机的机载智能化管理软件(UAV-IMS),和无人机飞控、导航等应用构件库(UAV-ASCLIB)。用以支撑无人机机载计算系统中飞行控制等任务执行的系统软件;第二部分是集成化的嵌入式开发环境,用于支持无人机机载应用软件设计、验证与确认、试验与测试,包括了模型驱动的机载软件开发工具(UAV-AADE)和无人机嵌入式软件测试仿真环境(UAV-SimuTest)。整体上,该支撑环境可以为新型无人机嵌入式系统的研制提供更为高效、可靠的开发工具、运行平台和测试环境。
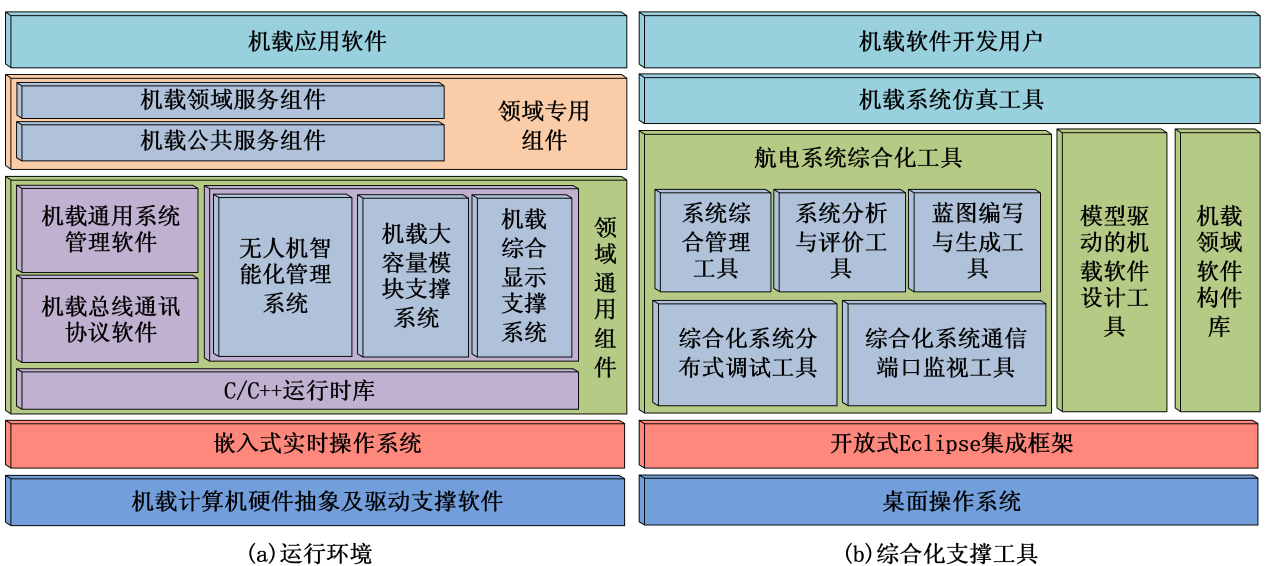
新型无人机机载软件支撑环境
应用驱动的多态实时计算模型,结合新型无人机应用特点,针对不同飞行模式下应用任务变化,可实时构建该模式下任务集与多态计算资源的映射关系,也可根据任务需求变化,动态重构相应的多态计算资源。多态实时计算模型逻辑结构具有层次特性,分为应用任务层、多态服务层、多态计算资源层。应用任务层为不同飞行模式下的多态应用任务集;多态服务层是在封装多态实时计算平台软硬件资源基础上的实时服务软件集,具有实时多态任务与资源状态感知及动态实时调度与协同能力,实现对应用变化感知及系统资源状态动态管理;多态计算资源层是多态硬件资源的集合。
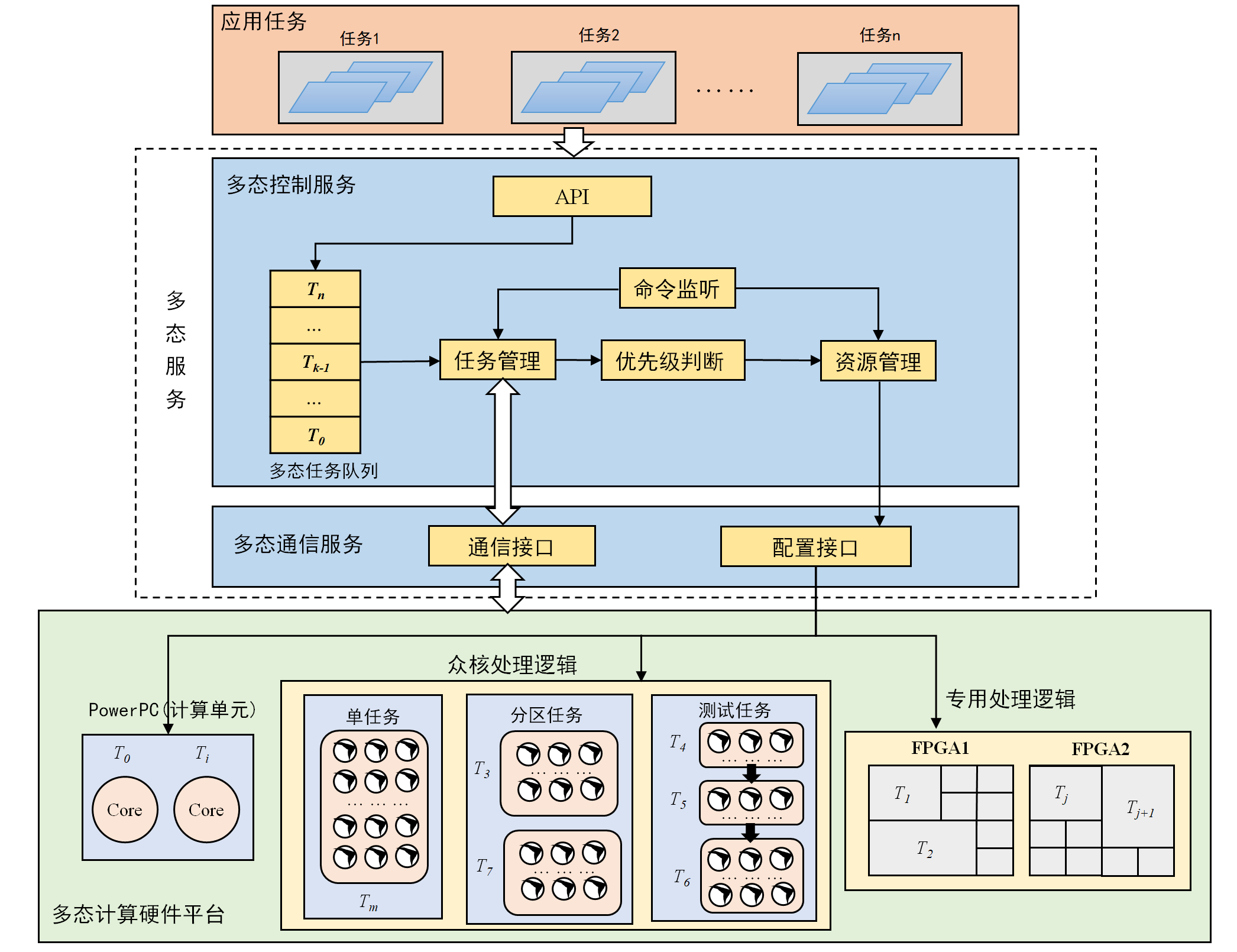
应用驱动的多态实时计算逻辑模型
基于应用驱动的多态实时计算模型,本项目构建了新型无人机机载嵌入式多态实时计算平台。平台采用基于高速交换式总线互连的异构化多处理机架构,包括PowerPC主处理机、专用逻辑处理机、众核处理机以及RapidIO交换模块。其中PowerPC主处理机、专用逻辑处理机、众核处理机为多态实时计算体系结构中的多态体,通过各部分的协调运行分工或协同完成应用任务。PowerPC主控处理机主要用于执行核心任务,管理任务形态、计算资源;专用逻辑处理机主要用于实现大计算量规则计算,为主处理机提供高速协处理支持,并局部动态重构片内专用处理逻辑以支持应用任务所需的处理能力;众核处理机为计算平台提供高性能实时计算,可适应不同计算需求动态分配计算资源。
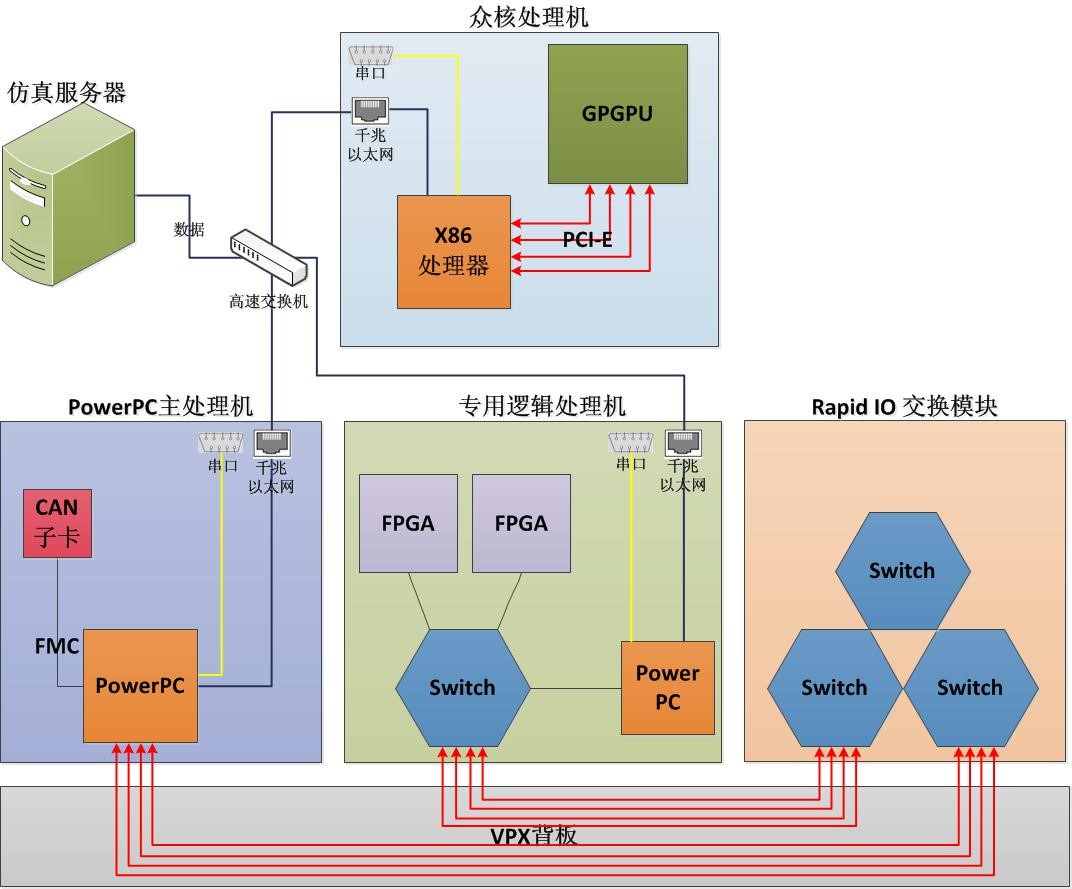
新型无人机机载多态实时计算平台硬件结构
结合无人机典型应用目标搜索与跟踪,本项目搭建了半数字半物理的综合仿真演示验证系统,对所提出的模型和方法进行了应用验证。综合仿真演示验证系统由飞行仿真平台、机载多态实时计算平台、新型无人机以及综合仿真与演示系统构成。
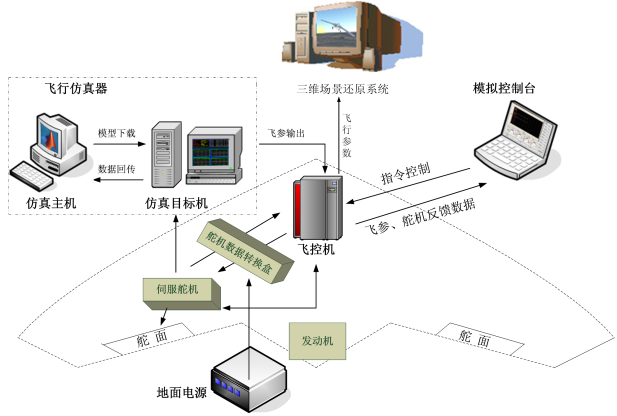
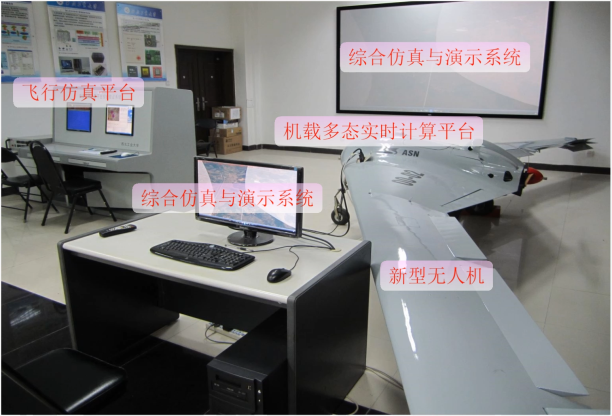
机载多态实时计算平台综合仿真验证系统

